2011 - Space-time planning in dynamic environments with unknown evolution.
T. Lopez, F. Lamarche, T.-Y. Li (2011). Space-time planning in dynamic environments with unknown evolution. MIG 2011, The Fourth International Conference on Motion in Games 2011.
|
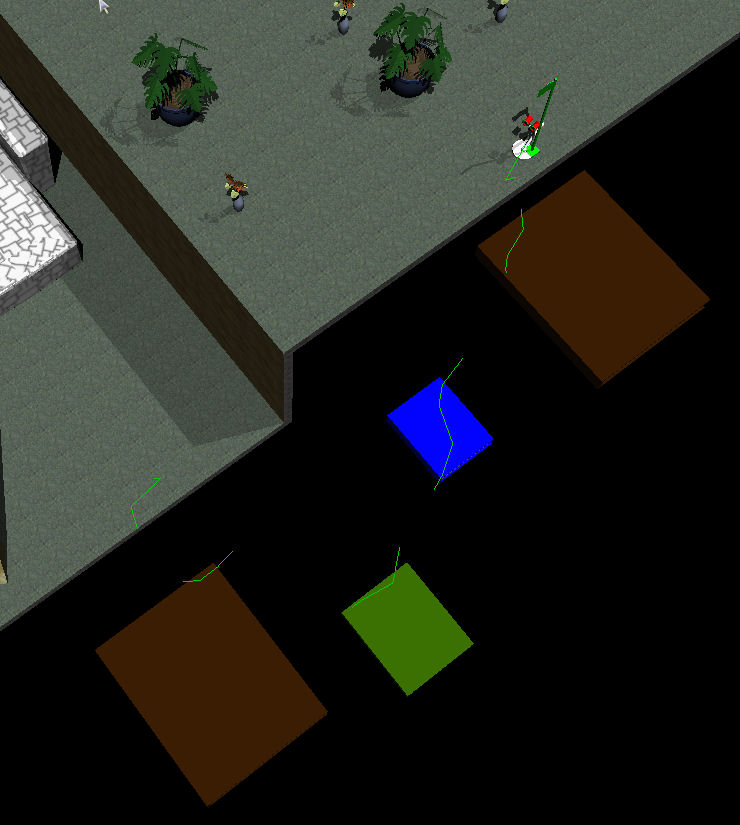
Abstract. Numerous path planning solutions have been proposed to solve the navigation problem in static environments, potentially populated with dynamic obstacles. However, in dynamic environments, moving objects can be used to reach new locations. In this paper, we propose an online planning algorithm for dynamically changing environments with unknown evolution. This method focuses on accessibility and on the use of objects movements to reach a given target. Among other examples, we will show that this algorithm is able to find a path through moving platforms to reach a target located on a surface that is never directly accessible. We will also show that the proposed representation enables several kind of adaptations such as avoiding moving obstacles or adapting the character postures to environmental constraints. |
|