
Franck Multon
Professor University Rennes 2 - Inria
2009
Interactive animation of virtual humans from motion capture data. F. Multon, R. Kulpa, L. Hoyet, T. Komura. Computer Animation and Virtual Worlds 20(5):1-9
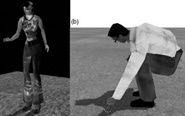
This paper presents a novel, parameteric framework for synthesizing new character motions from existing motion capture data. Our framework can conduct morphological adaptation as well as kinematic and physically-based corrections. All these solvers are organized in layers in order to be easily combined together. Given locomotion as an example, the system automatically adapts the motion data to the size of the synthetic figure and to its environment; the character will correctly step over complex ground shapes and counteract with external forces applied to the body. Our framework is based on a frame-based solver. This ensures animating hundreds of humanoids with different morphologies in real-time. It is particularly suitable for interactive applications such as video games and virtual reality where a user interacts in an unpredictable way.
This paper presents a novel, parameteric framework for synthesizing new character motions from existing motion capture data. Our framework can conduct morphological adaptation as well as kinematic and physically-based corrections. All these solvers are organized in layers in order to be easily combined together. Given locomotion as an example, the system automatically adapts the motion data to the size of the synthetic figure and to its environment; the character will correctly step over complex ground shapes and counteract with external forces applied to the body. Our framework is based on a frame-based solver. This ensures animating hundreds of humanoids with different morphologies in real-time. It is particularly suitable for interactive applications such as video games and virtual reality where a user interacts in an unpredictable way.


Morphology independent motion retrieval and control. N Pronost, F Multon, Q Li, W Geng, R Kulpa, G Dumont. International Journal of Virtual Reality 8 (4), 57
This paper addresses the problem of selecting and adapting a motion in order to make a virtual human interact with a user in real-time. We describe a method that is able to retrieve the most appropriate motion in interactive environments where
both the constraints and the character's morphology are not known in advance. The method described here is based on a
morphology-independent representation of motion to perform fast motion retargetting and retrieval. Because the size of the database is not infinite, even the best candidate motion may not satisfy precisely all the imposed constraints. As a second step of the algorithm, the selected motion is locally adapted in order to accurately satisfy these constraints. This adaptation allows dealing with a large set of possible movements even if no candidate in the database exactly fits the constraints.
This paper addresses the problem of selecting and adapting a motion in order to make a virtual human interact with a user in real-time. We describe a method that is able to retrieve the most appropriate motion in interactive environments where
both the constraints and the character's morphology are not known in advance. The method described here is based on a
morphology-independent representation of motion to perform fast motion retargetting and retrieval. Because the size of the database is not infinite, even the best candidate motion may not satisfy precisely all the imposed constraints. As a second step of the algorithm, the selected motion is locally adapted in order to accurately satisfy these constraints. This adaptation allows dealing with a large set of possible movements even if no candidate in the database exactly fits the constraints.

Virtual environments for sport analysis: perception-action coupling in handball goalkeeping. Nicolas Vignais, Benoit Bideau, Cathy Craig, Sebastien Brault, Franck Multon, Richard Kulpa. International Journal of Virtual Reality 8(4):43
In sports science, the link between the experimental protocol and the subject’s behaviour in real condition is a key issue.
Virtual reality enables to examine this topic because of the reproducibility of situations and the total control of animated humanoids in situations similar to the real world. This study aimed to an alyze the influence of the degree of perception-action coupling on the performance of handball goalkeepers in a virtual environment. 8 national handball goalkeepers were asked to react to the actions of a virtual handball thrower in two conditions: a perception-action uncoupled condition (defined as a judgment task) and a perception-action coupled condition (defined as a motor task). In the judgment condition, goalkeepers were asked to make a perceptual judgment with their hand in their own time after the virtual throw; in the motor task condition, goalkeepers had to react in real-time to the virtual throwing motion. Results showed that percentage of successful response was higher in the motor task condition and radial error (distance between the ball and the closest limb when trial was unsuccessful) was lower for the same condition. Implications of our findings are discussed, as well as suggestions for further research.
In sports science, the link between the experimental protocol and the subject’s behaviour in real condition is a key issue.
Virtual reality enables to examine this topic because of the reproducibility of situations and the total control of animated humanoids in situations similar to the real world. This study aimed to an alyze the influence of the degree of perception-action coupling on the performance of handball goalkeepers in a virtual environment. 8 national handball goalkeepers were asked to react to the actions of a virtual handball thrower in two conditions: a perception-action uncoupled condition (defined as a judgment task) and a perception-action coupled condition (defined as a motor task). In the judgment condition, goalkeepers were asked to make a perceptual judgment with their hand in their own time after the virtual throw; in the motor task condition, goalkeepers had to react in real-time to the virtual throwing motion. Results showed that percentage of successful response was higher in the motor task condition and radial error (distance between the ball and the closest limb when trial was unsuccessful) was lower for the same condition. Implications of our findings are discussed, as well as suggestions for further research.
Does the level of graphical detail of a virtual handball thrower influence a goalkeeper’s motor response? N Vignais, B Bideau, C Craig, S Brault, F Multon, P Delamarche, R Kulpa. Journal of sports science & medicine 8 (4), 501
The authors investigated how different levels of detail (LODs) of a virtual throwing action can influence a handball goal-keeper’s motor response. Goalkeepers attempted to stop a virtual ball emanating from five different graphical LODs of the same virtual throwing action. The five levels of detail were: a textured reference level (L0), a non-textured level (L1), a wire-frame level (L2), a point-light-display (PLD) representation (L3) and a PLD level with reduced ball size (L4). For each motor response made by the goalkeeper we measured and analyzed the time to respond (TTR), the percentage of successful motor responses, the distance between the ball and the closest limb (when the stopping motion was incorrect) and the kinematics of the motion. Results showed that TTR, percentage of successful motor responses and distance with the closest limb were not significantly different for any of the five different graphical LODs. However the kinematics of the motion revealed that the trajectory of the stopping limb was significantly different when comparing the L1 and L3 levels, and when comparing the L1 and L4 levels. These differences in the control of the goalkeeper’s actions suggests that the different level of information available in the PLD representations (L3 and L4) are causing the goalkeeper to adopt different motor strategies to control the approach of their limb to stop the ball.
The authors investigated how different levels of detail (LODs) of a virtual throwing action can influence a handball goal-keeper’s motor response. Goalkeepers attempted to stop a virtual ball emanating from five different graphical LODs of the same virtual throwing action. The five levels of detail were: a textured reference level (L0), a non-textured level (L1), a wire-frame level (L2), a point-light-display (PLD) representation (L3) and a PLD level with reduced ball size (L4). For each motor response made by the goalkeeper we measured and analyzed the time to respond (TTR), the percentage of successful motor responses, the distance between the ball and the closest limb (when the stopping motion was incorrect) and the kinematics of the motion. Results showed that TTR, percentage of successful motor responses and distance with the closest limb were not significantly different for any of the five different graphical LODs. However the kinematics of the motion revealed that the trajectory of the stopping limb was significantly different when comparing the L1 and L3 levels, and when comparing the L1 and L4 levels. These differences in the control of the goalkeeper’s actions suggests that the different level of information available in the PLD representations (L3 and L4) are causing the goalkeeper to adopt different motor strategies to control the approach of their limb to stop the ball.

From bone to plausible bipedal locomotion. Part II: Complete motion synthesis for bipedal primates. G Nicolas, F Multon, G Berillon. Journal of biomechanics 42 (8), 1127-1133
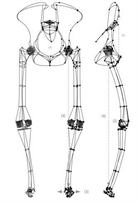
This paper addresses the problem of synthesizing plausible bipedal locomotion according to 3D anatomical reconstruction and general hypotheses on human motion control strategies. In a previous paper [Nicolas, G., Multon, F., Berillon, G., Marchal, F., 2007. From bone to plausible bipedal locomotion using inverse kinematics. Journal of Biomechanics 40 (5) 1048–1057], we have validated a method based on using inverse kinematics to obtain plausible lower-limb motions knowing the trajectory of the ankle. In this paper, we propose a more general approach that also involves computing a plausible trajectory of the ankles for a given skeleton. The inputs are the anatomical descriptions of the bipedal species, imposed footprints and a rest posture. This process is based on optimizing a reference ankle trajectory until a set of criteria is minimized. This optimization loop is based on the assumption that a plausible motion is supposed to have little internal mechanical work and should be as less jerky as possible. For each tested ankle trajectory, inverse kinematics is used to compute a lower-body motion that enables us to compute the resulting mechanical work and jerk. This method was tested on a set of modern humans (male and female, with various anthropometric properties). We show that the results obtained with this method are close to experimental data for most of the subjects. We also demonstrate that the method is not sensitive to the choice of the reference ankle trajectory; any ankle trajectory leads to very similar result. We finally apply the method to a skeleton of Pan paniscus (Bonobo), and compare the resulting motion to those described by zoologists.
This paper addresses the problem of synthesizing plausible bipedal locomotion according to 3D anatomical reconstruction and general hypotheses on human motion control strategies. In a previous paper [Nicolas, G., Multon, F., Berillon, G., Marchal, F., 2007. From bone to plausible bipedal locomotion using inverse kinematics. Journal of Biomechanics 40 (5) 1048–1057], we have validated a method based on using inverse kinematics to obtain plausible lower-limb motions knowing the trajectory of the ankle. In this paper, we propose a more general approach that also involves computing a plausible trajectory of the ankles for a given skeleton. The inputs are the anatomical descriptions of the bipedal species, imposed footprints and a rest posture. This process is based on optimizing a reference ankle trajectory until a set of criteria is minimized. This optimization loop is based on the assumption that a plausible motion is supposed to have little internal mechanical work and should be as less jerky as possible. For each tested ankle trajectory, inverse kinematics is used to compute a lower-body motion that enables us to compute the resulting mechanical work and jerk. This method was tested on a set of modern humans (male and female, with various anthropometric properties). We show that the results obtained with this method are close to experimental data for most of the subjects. We also demonstrate that the method is not sensitive to the choice of the reference ankle trajectory; any ankle trajectory leads to very similar result. We finally apply the method to a skeleton of Pan paniscus (Bonobo), and compare the resulting motion to those described by zoologists.